人工智能科技成果奖一等奖
项目名称:水上水下一体化空间数据智能获取系统及智慧海洋应用
完成单位:金景(海南)科技发展有限公司、海南师范大学
主要完成人:白颢、伍丽莉、王泽玮、彭鸿雁、王艺臻、曲培元、羊大立、吴小曼、陈朝阳、莫书鹏
项目研究开发内容为基于多波束声呐传感器与移动激光雷达传感器的水上水下一体化三维扫描测量系统,用于浅海岛礁、河流、湖泊、水库等区域的水上水下一体化三维空间信息数据的获取、编辑及处理。采用基于同一套惯性导航测量系统的方案,同时集成水下多波束声呐传感器与移动激光雷达传感器,达到系统高度集成与小型化的特点;采用北斗高精度授时的方案对主控制惯性导航测量系统进行数据授时,依据自有专利的时钟同步方案同时对水下多波束传感器与水上激光雷达传感器进行超低延时的数据授时,达到整体系统完全数据同步;在整体系统传感器时钟高度同步基础上,结合水下声呐与水上激光雷达TOF(time of flying)探测原理,最终完成水上水下三维空间数据的同步数据获取与反演。
金景(海南)科技发展有限公司依托北京金景科技研发的超轻便携激光Lidar算法技术基础及核心研发团队技术实力,结合各合作单位的科研技术能力,在海南地区进一步研发三维激光Lidar扫描系统和水下多波束探测系统的集成,具有专项解决滩涂、岸线、海岛、潮间带、近海等区域的地理信息快速获取、短周期获取、变化监测等诸多难题,极大增强海洋智慧管理的能力并提升监察工作效率,可为智慧海南提供精准、高频、详细的三维空间信息。
金景科技BS-LS-20水上水下一体化三维测量系统,采用移动激光雷达与水下多波束声呐技术,用于浅海岛礁、河流、湖泊、水库等区域的水上水下一体化三维空间信息数据的获取、编辑及处理。
BS-LS-20水上水下一体化系统主要包含三大部分系统组件:激光雷达系统组件、惯性导航及系统控制组件、多波束声呐系统组件。系统产品主要特点:
(1)核心传感器模块化设计;
项目产品核心组件采用模块化设计集成方案,安装操作简便,系统组合方式多样,可在各种载体搭载,包括有人船与无人船等;两大核心探测传感器系统可以在主控制系统协调下统一整体工作,也可单独系统运行,适应多种空间信息采集需求。
(2)系统核心组件重量轻、体积小、一体化设计;
产品核心组件部分,水上激光雷达系统重量小于2kg,水下多波束传感器重量4kg,并采用一体化集成设计方案,便携轻便,易于运输,适用于各种工况。
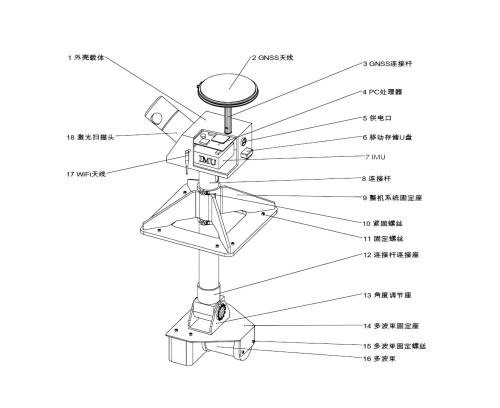

水上水下一体化采集系统组成
创新点:水上水下同一个位置数据一体化获取,核心硬件传感器高度集成化,适用于浅海环境的一体化惯性导航系统集成,水下多波束系统与水上激光雷达系统的模块化构成。
近海岛礁区域立体空间数据获取是近海海域与岛礁区域经济开发的数据基础,在前期便携式移动激光雷达系统研发的基础上,结合无人船与水下多波束技术,依托海口市海洋局海口市经济创新发展示范城市产业孵化集聚创新类子项目(项目编号:HHCF20180104),开展水上水下一体化三维数据扫描探测装备系统集成研发,整体研发经费投入超过2400万元,其中国拨项目经费800万元。项目成果:发明专利1项,论文12篇,实用新型专利10项,外观设计专利8项,软件著作权22项,软件产品测试报告3项,系统用户手册1本,查新报告1项,第三方设备检测报告1项,科技成果鉴定1项,企业标准4个,技术方案14个,培养中高级人才7人,获得职称提升13人,学历提升3人等;建成实验室和见习就业基地等9个基地。
项目案列——长江沿岸滩涂测绘
1.项目概况
该项目位于长江流域张家港至崇明岛尾的沿岸滩涂测绘,总面积为45平方公里,因作业面积大,且滩涂测绘受潮汐涨落影响巨大,每天作业时间只有4个小时。
项目日期:2016年12月1日
项目区域:45平方公里长江沿岸滩涂
项目成果:DEM,等高线
2.项目实施
根据现场的实际环境最终决定采用无人机机载雷达方式,特点为不受地形影响,可以快速针对滩涂区域进行高空测量,每个架次可有效飞行35分钟,采集数据面积1平方公里,整体项目共用时11天。
3.项目成果
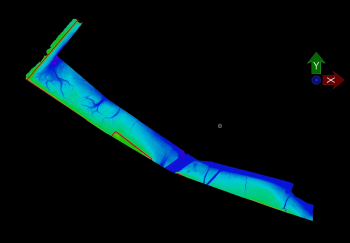
【图】DEM成果1
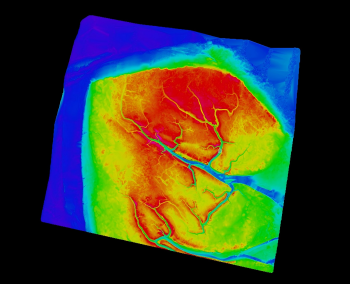
【图】DEM成果2
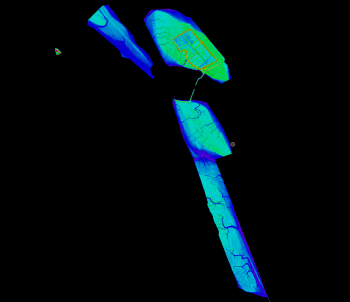
【图】DEM成果3
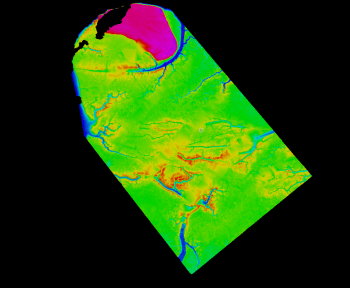
【图】DEM成果4
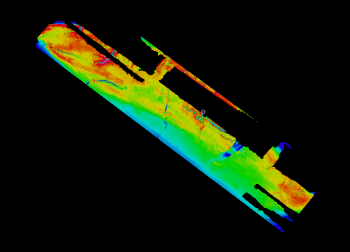
【图】DEM成果5
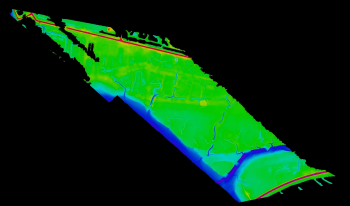
【图】DEM成果6


